

11.03.2026
4 minutes of reading



Thesis by Hadj Ahmed Belghazali: "Commande sans capteur mécanique à basse vitesse d'une machine synchrone à aimants permanents et très basse tension" (Sensorless control at low speed of a permanent magnet synchronous machine at very low voltage), University of Cergy-Pontoise, 2025
Electric mobility is a key solution for reducing CO2 emissions and combating global warming. In this context, PhD research conducted at IFPEN focused on developing a sensorless control method for permanent magnet synchronous motors (PMSMs) operating at extra-low voltage (48 Vdc) and intended for sustainable electric vehicles, such as license-free cars, scooters, and electric bicycles. This control method, based on the acquisition of electrical signals and the injection of high-frequency (HF) signals, eliminates the need for a mechanical position sensor, thereby reducing manufacturing costs while ensuring accurate estimation, particularly at low speeds and when stationary. A method for optimizing the amplitude of HF injection, based on a digitally enriched experimental database, was developed to limit disturbances induced on the system, such as torque oscillations and energy consumption, while ensuring reliable estimation. This approach has been experimentally validated and can be easily adapted to other types of electric machines. It offers an industrializable solution for a variety of applications.
A need for sustainable mobility that is accessible to all
The global energy transition highlights electric mobility as a key solution for reducing CO2 emissions and tackling global warming. With this perspective, IFPEN proposes making electric machines more accessible to promote their use in soft mobility and license-free cars.
Synchronous machines, often used in transport electrification, are characterized by their compact size and high level of performance. However, controlling them requires precise knowledge of the speed and position of the rotor, which is usually obtained using mechanical position sensors. Although effective, these sensors have several limitations: they increase the cost and size of the system, complicate their integration, particularly at the end of the shaft, and require more electrical wiring. They can also be prone to failure, thereby impacting the overall reliability of the system.
In extra-low voltage applications, such as those found in soft mobility, cost constraints have become a significant barrier to reducing the price of machines intended for economic use. This challenge has prompted the development of alternative solutions. IFPEN opted for a control system without a mechanical position sensor, which, in addition to reducing costs, ensures efficient and dynamic control of electric machines. In transport applications, a key feature of control system is the requirement for a wide operating range covering several phases, from complete stop to maximum speed. It is therefore essential to have precise knowledge of the electrical position of the rotor in the different phases: “machine at a standstill,” “low speeds,” and “medium and high speeds.”
Sensorless controls
For synchronous machines, sensorless control methods are mainly based on the acquisition of electrical signals (currents/voltages) to estimate the rotational speed and position of the rotor. These methods, which are effective in “medium and high speed” zones, have limitations in “very low speed” and “stationary” zones, where the amplitudes and frequencies of the signals acquired are low or even non-existent. To overcome this, high-frequency (HF) signal injections can be utilized to extract additional information about the controlled system and identify the rotor’s position. The effectiveness of this technique depends on the choice of the injection method as well as the amplitudes and frequencies of the HF signals applied.
IFPEN's research focused on methods for estimating position in low-speed zones, including when stationary, where HF signal injection is a critical issue. The choice of HF injection method is crucial, as it directly influences the disturbances induced in the system, particularly for machines operating at extra-low voltage.
Among the various approaches, the pulsating carrier voltage injection method was chosen for its high performance and simplicity [1]. This method consists of superimposing a HF voltage onto the control voltages and measuring the resulting stator current, which allow the estimation of the electrical rotor’s position. However, applying these methods to extra-low voltage machines, used in applications such as hybrid vehicles, license-free cars, and soft mobility, poses significant challenges. These machines are particularly sensitive to the effects of high injection amplitudes, which can generate significant harmonic currents and torque ripple on the machine shaft.
Determining the optimal HF voltage amplitude is ultimately a complex task. While excessive amplitude may disrupt the motor torque, too low amplitude may cause errors when estimating the electrical rotor’s position [2]. In order to better understand this delicate balance, we focused on analyzing the impact of injection amplitudes on position estimation [3] and proposed an optimization method, based on experimental data. This method aims to balance estimation accuracy with minimizing system disturbances [4].
Method for optimizing HF injection amplitude
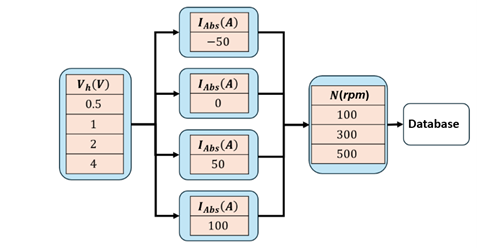
The method developed by IFPEN is based on a reduced experimental database, enriched numerically, which limits the amount of data required and the time needed to acquire it. This database includes 4 HF voltage amplitudes (Vh), 4 load levels (IAbs) and 3 speed values (N), as shown in Figure 1. The objective is to determine the optimal voltage amplitude by balancing the quality of the position estimation and the disturbances induced by the injection, perceived as costs for the system.
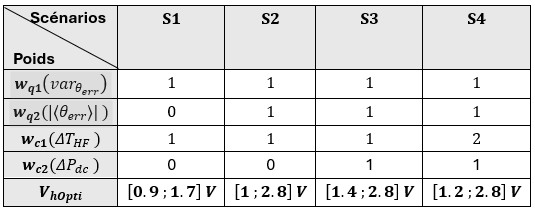
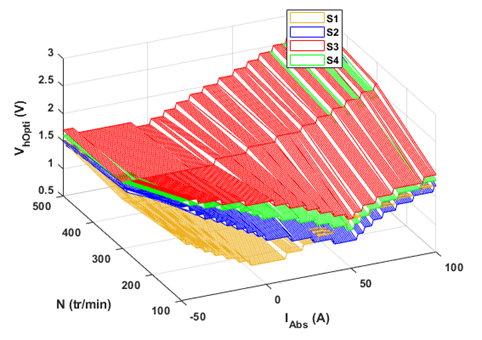
The method is based on several evaluation criteria, such as minimizing the position estimation error and its variance to ensure the quality of the estimated position, as well as limiting torque oscillations and continuous power consumption, factors that can adversely affect operating costs. It also allows different optimization scenarios in order to analyze the influence of each parameter on the optimal result. For example, the figures 2 and 3 present four scenarios incorporating various quality and cost criteria weightings and their impact on the amplitude of the optimal HF voltage (Vhopti). The weightings are designated by wq1 and wq2 for the quality criteria, respectively linked to the variance of the position estimation error and to the mean value of the error, and by wc1 and wc2 for the cost criteria, corresponding respectively to torque oscillations and continuous power consumption.
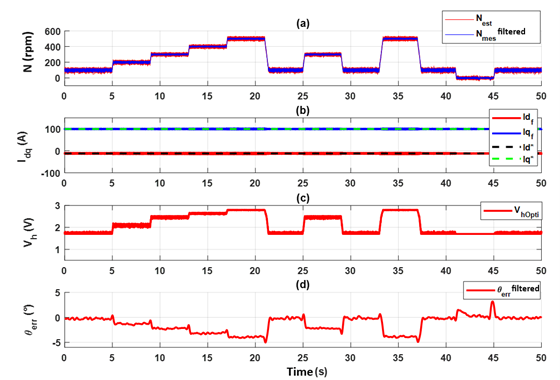
Experimental validation of this method, carried out on a test bench and illustrated in Figure 4, demonstrates correct functioning of the sensorless control with a variable injection amplitude, over a speed range from -100 rpm to 500 rpm, including at standstill. The results presented in this figure were obtained with voltage injection optimized according to scenario 2. Subfigure (a) shows a comparison between the estimated speed with optimized HF voltage (Nest) and the measured speed (Nmes), highlighting the good convergence of the estimated speed. Subfigure (b) illustrates an excerpt from the current regulation, showing a comparison between the measured currents (Idqf) and their reference values (I*dq). Subfigure (c) shows the optimized HF voltage (Vhopti), while subfigure (d) shows the position estimation error (θerr) obtained with Vhopti.
Industrially scalable solution
The method proposed by IFPEN not only optimizes the amplitude of the HF voltage, but also offers a solution that can be easily deployed in an industrial context. Moreover, the use of an experimental database means that this approach can be easily adapted to other electric machines, regardless of their supply voltage range or power.
References:
[1] D. Raca, P. Garcia, D. D. Reigosa, F. Briz and R. D. Lorenz, "Carrier-Signal Selection for Sensorless Control of PM Synchronous Machines at Zero and Very Low Speeds," in IEEE Transactions on Industry Applications, vol. 46, no. 1, pp. 167-178, Jan.-feb. 2010,
>> DOI : 10.1109/TIA.2009.2036551
[2] A. A. Khan and O. Mohammed, "Wavelet filtering for position estimation of permanent magnet machine in carrier signal injection based sensorless control," 41st North American Power Symposium, Starkville, MS, USA, 2009, pp. 1-5,
>> DOI : 10.1109/NAPS.2009.5484072
[3] H. A. Belghazali, N. H. Obeid, N. -T. Trinh, L. Id-Khajine and E. Monmasson, "Application of a HF Signal Injection Sensorless Method for an Extra Low Voltage PMSynRel," 2024 IEEE 18th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Gdynia, Poland, 2024, pp. 1-6,
>> DOI : 10.1109/CPE-POWERENG60842.2024.10604399
[4] H. A. Belghazali, N. H. Obeid, E. Monmasson, N. -T. Trinh, L. Id-Khajine, "Data-Driven Optimisation Method for Tuning the HF Injection Parameters of an Extra Low Voltage Encoderless Synchronous Motor Drive," Power Electronics and Drives, vol.10 (45), 2025,
>> DOI : 10.2478/pead-2025-0022
Scientific contacts: Najla Haje Obeid,Ngoc-Tu Trinh
You may also be interested in
