

27.08.2019
5 minutes of reading




The IFPEN team for the "Wave Energy Converter Control" Project led by Paolino Tona won the trophy for the first phase of the WEC Control Competition (WECCCOMP), and the prize-giving took place at the 38th International Conference on Ocean, Offshore & Arctic Engineering (OMAE Conference).
The competition, organized by the Centre for Ocean Energy Research (COER, Ireland), the National Renewable Energy Laboratory (NREL, USA), Sandia National Laboratories (USA), and Aalborg University (Denmark), consists in designing a control system for maximizing the electricity generated by a prototype of a machine for converting wave energy into electrical power, firstly in simulation and then experimentally in a tank. This prize confirms the excellence of IFPEN's R&I for WEC control systems, which have a crucial part to play in industrially rolling out WECs.
Offering an enormous raw potential (estimated between 18,000 and 31,000 TWh/year globally1), harvesting energy from waves is considered to be a promising technical solution that, ultimately, could cover from 5% to 20% of global electricity consumption. It is a form of energy that is very advantageous from the point of view of diversifying the energy mix for two reasons:
- its availability is relatively easy to predict, with mean power level forecasts available 1 or 2 days in advance;
- its intermittence is different from that of other renewable energies, such as solar energy and wind power. This technology harvests energy from ocean waves, which are formed thousands of miles away, which do not become weaker at night, and whose intensity is independent of local winds.
In the hope of harvesting this potential, hundreds of concepts and designs for machines enabling energy to be extracted from waves - wave energy converters (WECs) – have been proposed and developed, from the 1970s onwards.
Some of them have enabled prototypes to be produced that have been tested at sea and have even generated electricity for periods of various lengths. However, the economic viability and the reliability of WECs over the long term remains to be proved. A considerable reduction in current costs that the European Commission estimates at at least a 75% reduction by 20252, will be necessary for wave energy to become competitive compared with other forms of renewable energy.
Active control of wave energy converter systems constitutes one of the essential issues for improving the profitability of wave power.
For several years now, IFPEN has been working to develop solutions to a range of estimation and control problems for WEC systems, with a view to satisfying the needs expressed by certain industrial partners.
In particular, IFPEN has developed full control systems, designed more specifically for point absorbers and attenuators, such as the Wavestar machine. That machine is made up of a set of 20 hemispherical floats (each having a diameter of 6 meters, for a power plant capable of generating 1 MW), the floats being connected to a fixed structure via hinged arms housing the Power Take-Off (PTO) systems, i.e. the secondary converters.
The most advantageous control system for this type of WEC is a non-linear Model Predictive Control (MPC) system3.4, a diagram of which is shown below.
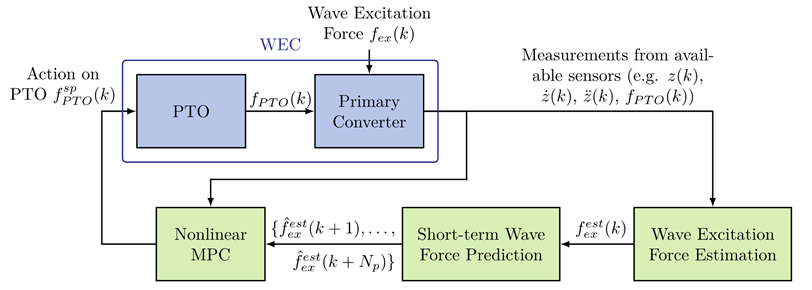
It is based on:
• algorithms for on-line estimation of the wave excitation force on the basis of measurements (or estimates) of the position and of the velocity of the float and of the force applied by the PTO5;
• algorithms for short-term prediction of future wave excitation force values, on the basis of a time series of past values6;
• algorithms for model predictive control that are capable of running in real time, and that take into account:
- a PTO efficiency that is not ideal, and that is different in motor mode and in generator mode;
- PTO dynamics that are simple (linear);
- constraints (saturation) on the force that the PTO can deliver.
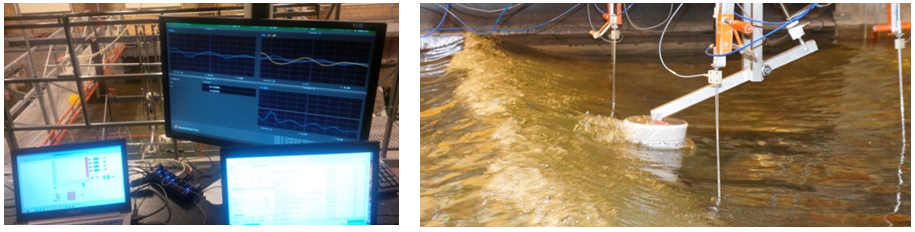
This control system was validated by tank tests at Aalborg University, on a small-scale model of a Wavestar float, subjected to the action of different irregular waves.
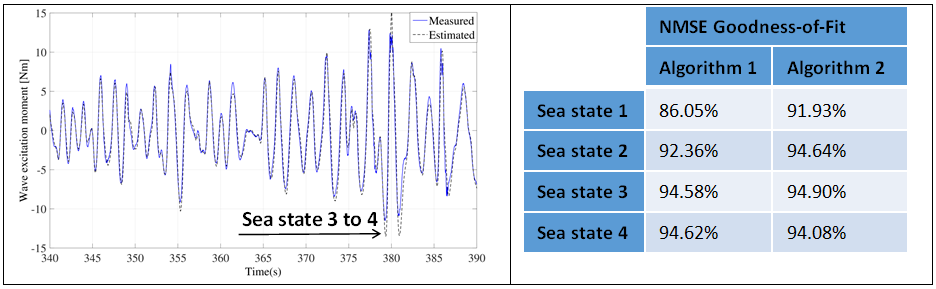
Power generation gains of about 20% were observed for the most representative waves, compared with the initially proposed reference control. These encouraging results are attributable to the good performance of each building block in the system. This applies, for example, to two algorithms developed for estimating wave excitation force: the first is based on a Kalman filter with a random walk model, and the second on an unknown-input rolling-horizon estimator. Their results do not show any significant deviation relative to the excitation force measured in a dedicated test, with the float locked, even in a changing sea state.
With a view to developing a modular approach, with control systems that are of different complexity, and that are adaptable to different machines, IFPEN has also proposed a simpler control system referred to as an "adaptive PI control" system7.
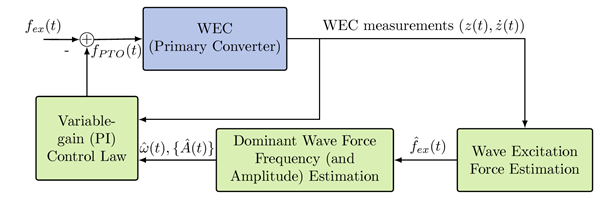
It is based on:
• the algorithms for on-line estimation of the wave excitation force (the same ones as for the MPC);
• an algorithm for on-line estimation of the dominant frequency of the wave excitation force8;
• optimum gain curves as a function of the dominant frequency, pre-computed off-line by considering a non-ideal efficiency for the PTO.
This approach, which can easily be applied to the majority of WEC machines, makes it possible to improve energy harvesting by at least 10% relative to the reference control in constant sea states, and potentially by much more in changing sea states.
It should be noted that this work has also produced an additional result, by restricting a principle of conventional hydrodynamic control theory. That principle indicates that the optimum velocity of the primary converter should be in phase with the wave excitation force in order to maximize power generation. Whereas actually that is false when the conversion efficiency of the PTO is not ideal (i.e. less than 100%).
Even though avenues for research remain to be explored to enable the monitoring and control systems to make wave energy converters fully viable economically, the work conducted at IFPEN has enable significant progress to be made by proposing solutions that are effective and already implementable. This has made IFPEN a recognized player today, at the cutting edge of this field9.
Through a collaborative project with ADEME (the French Environment and Energy Management Agency), IFPEN is currently working on optimizing the power generation of SBM Offshore's S3™ electro-active polymer converter, by developing algorithms for short-term prediction of deformation of the tube wall under the action of the waves. It is estimated that these algorithms, coupled with semi-active load-cycle control developed by SBM, can make it possible to increase the power generation of the converter very considerably.

IFPEN Contact: Paolino Tona
Operating principle and control of WEC systemsAlthough technological convergence has not yet taken place, the basic operating principle is the same for most WEC systems: the energy is harvested from an oscillatory or circular motion induced by the waves (Figure 1). .PNG) In a WEC, there is a primary converter, which is generally an oscillating body (or a set of oscillating bodies) that harvests the mechanical energy through hydrodynamic interaction with the waves. The mechanical energy is converted into electricity (or into some other usable form of energy) when the power take-off system (PTO, which is the secondary converter) applies a force (or a set of forces) opposite from the movement of the primary converter. In certain WECs, the force applied by the PTO is, by design, generated passively. But for many WECs, it is necessary to design an active control system that makes it possible to instruct the PTO to apply forces that change the dynamic response of the primary converter to the forces exerted by the waves. Such active control may be used to improve the harvesting and/or to reduce the forces exerted on the components of the WEC. |
1 Mork, G., Barstow, S., Pontes, M.T. and Kabuth, A., 2010. “Assessing the global wave energy potential”. In: Proceedings of OMAE2010 (ASME), 29th OMAE Conference, Shanghai, China, China, 6-10 June 2010.
2 European Commission. “European Commission: SET Plan – Declaration of Intent on Strategic Targets in the context of an Initiative for Global Leadership in Ocean Energy”, 2016.
3 Tona, P., Nguyen, H.-N., Sabiron, G., and Creff, Y., 2015. “An efficiency-aware model predictive control strategy for a heaving buoy wave energy converter”. Proc. EWTEC2015, Nantes, FR
4 Nguyen, H.-N., Sabiron, G., Tona, P., M. Kramer, Vidal Sánchez, E., 2016. “Experimental validation of a nonlinear Model Predictive Control strategy for a wave energy converter prototype”. Proc. OMAE2016, Busan, KR
5 Nguyen, H.-N. and Tona, “Wave excitation force estimation for wave energy converters of the point absorber type”, IEEE Transactions on Control Systems Technology, DOI: 10.1109/TCST.2017.2747508 , 2018
6 Nguyen, H.-N. and Tona, P., “Short-term wave force prediction for wave energy converter control, Control Engineering Practice”, vol. 75, pp. 26–37, 2018
7 Nguyen, H.-N and Tona, P., “Continuously Adaptive PI-Control of Wave Energy Converters under Irregular Sea-State Conditions”, In Proceedings of the European Wave and Tidal Energy Conference (EWTEC) 2017
8 Nguyen, H.-N., Tona, P., and Sabiron, G., Dominant wave frequency and amplitude estimation for adaptive control of wave energy converters, in MTS/IEEE OCEANS 2017 Conference, Aberdeen, U.K., 1978
9 Magagna, D., Margheritini, L. “Workshop on identification of future emerging technologies in the ocean energy sector”, JRC Conference and Workshop Report, 2018
10 Ocean Energy Discussion Paper (2016), a contribution of the OES to the OECD study “The Future of the Ocean Economy: Exploring the prospects for emerging ocean industries to 2030”
11 Wave Energy Scotland (WES), “Control Requirements for Wave Energy Converters Landscaping Study”, Technical report ref. WES_LS04_ER_Controls, WES, July 2016.
12 Korde, U. A. and Ringwood, J. “Hydrodynamic Control of Wave Energy Devices”. Cambridge University Press, 2016.
13Falnes, J., “A review of wave-energy extraction”, Marine Structures, 20(4):185{201}, 2007